設備開発 XVLソリューション
メカトロ検証
設備・装置の先行検証
概要
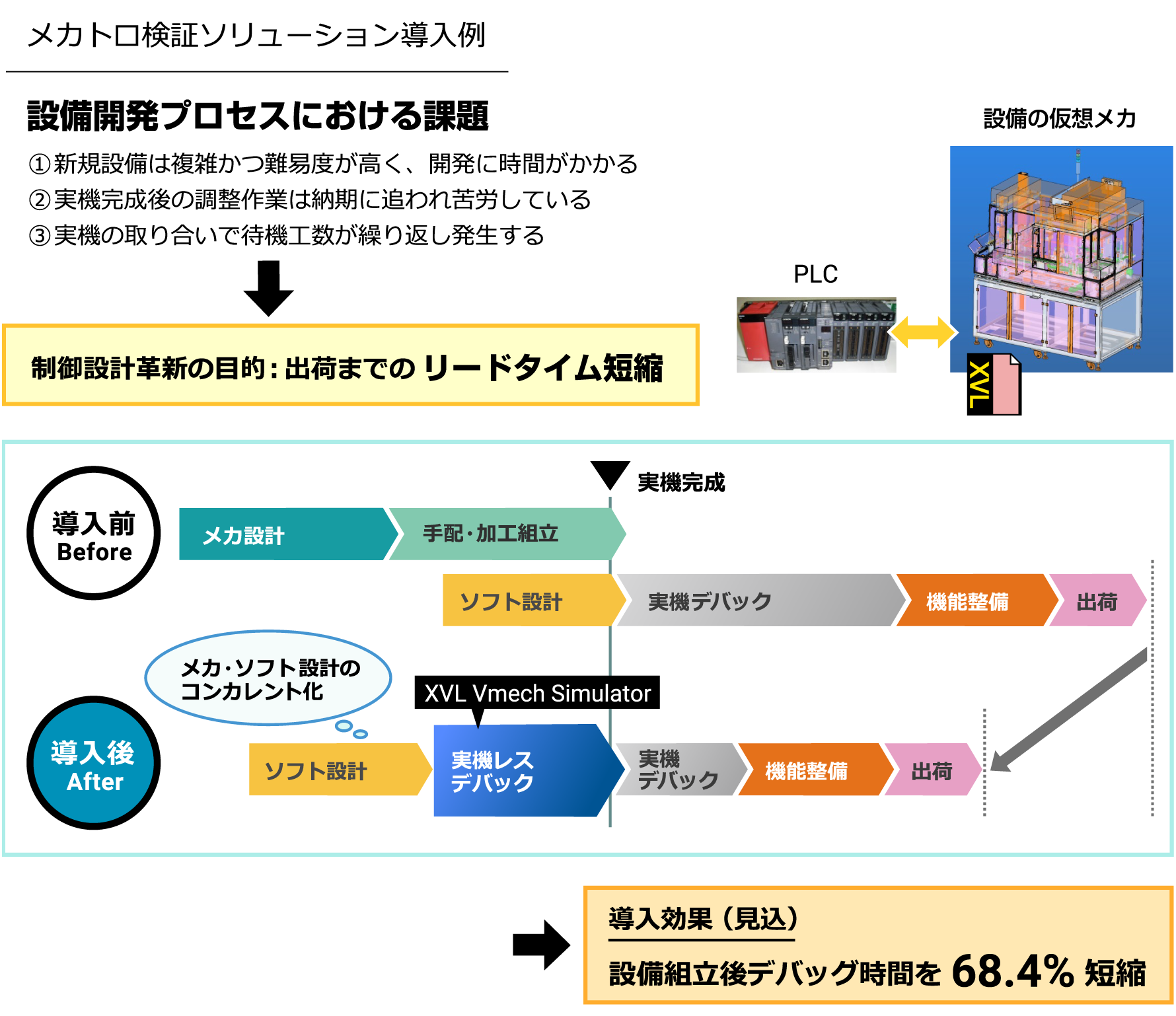
メカトロ検証における課題
- 実機を用いた調整・試験に時間がかかる
- 実機で見付かった問題によって多くの手戻りが発生する

メカトロ検証に対する XVL 導入効果
これまで生産設備の設計検証や、それを制御するための PLC のソフトウェア検証は実機の完成を待たなければ着手できませんでした。しかし、XVL を使えば、実機完成前に仮想環境上でメカおよびソフトウェアの動作検証を行うことができます。これにより、メカ設計の品質を上げて手戻りを減らすとともに、ソフトウェアの検証やデバッグに早い段階から着手でき、品質向上とともに大幅な開発リードタイム短縮を実現できます。

ラティス・テクノロジーのすべてのデモムービーはYouTubeチャンネルでご覧になれます。
メカトロ検証における課題
実機を用いた調整・試験に時間がかかる
製品を適切なタイミングで市場に投入するには、製品開発のリードタイム短縮はもちろんのこと、素早く生産体制を立ち上げることが不可欠です。ここで鍵を握るのが、生産設備の開発プロセスです。生産設備は通常、まずメカ設計者が機構を設計し、実機が完成してからソフトウェア開発者が実機上で制御ソフトウェアの検証やテスト・デバッグを行います。
しかし、数が限られている実機環境を利用できる時間は限られていますから、メカ設計者とソフトウェア設計者がそれぞれ検証作業に費やせる時間も限られてしまい、なかなか開発プロセス全体の効率化が進みません。そんな中、メカとソフトウェアの双方で不具合が噴出し、テストやデバッグのために実機の利用時間の奪い合いになるという光景が生産設備の開発現場ではよく見られます。
実機で見付かった問題によって多くの手戻りが発生する
従来の生産設備開発の進め方では、メカ設計者は実機が完成して初めてそのリアルな動作を目の当たりにし、意図した通りの動作をしているかどうか確認することができます。同様にソフトウェア設計者も、それまで生産設備の仕様を基に机上で設計・開発してきた制御ソフトウェアが、果たして実機において正常に動作するかは、実機が完成して PLC と接続してみて初めて検証可能となります。
そのため多くの開発現場では、実機テストにおいてメカ・ソフトウェア双方で、それまで机上で見付けることができなかった潜在的な問題が数多く発覚し、その対応に追われることになります。開発スケジュールが逼迫している場合は、ハードウェアを修正するための十分な時間が取れないため、やむなくハードウェアが原因の問題であっても制御ソフトウェア側で対応せざるを得なくなり、ソフトウェア設計者に多大な負担を強いることになります。
メカトロ検証の課題を XVL で解決
メカ/制御仕様の先行検証
XVL を使えば、実機の完成を待たずに仮想環境上で生産設備の動作検証を行うことが出来ます。3D CAD を使って設計した生産設備のデータを基に XVL データを生成し、機構を定義することによって仮想メカモデルを作成することができます。
仮想メカモデルは、制御仕様であるタイミングチャートにより動作シミュレーションを行うことが出来るため、設備の設計段階で機構設計や制御仕様に対する潜在的な問題点をつぶしておくことが可能となります。実機完成後に発覚する不具合の数を大幅に減らすことができるため、実機を使った検証期間を短縮し、開発リードタイム全体を短縮することができます。
制御ソフトウェアの先行検証
XVL Vmech Simulator を使うことにより、XVL データを使って、PLC 上の制御ソフトウェアの検証を行うことができます。XVL を使って実現した仮想の設備モデルと、コントローラや制御ソフトウェアを接続し、実際に動作を確認しながらソフトウェアのテスト、デバッグを実施できます。
Vmech が実現する仮想環境は、さまざまな機種の PLC やロボット・コントローラ、OLT(オフラインツール)をサポートしており、これらを複数同時に接続することもできます。また、複数にまたがる工程のシミュレーションも可能になっています。このように、極めてリアルな環境で効率的にソフトウェアの検証を進めることができます。
ラティス・テクノロジーのすべてのデモムービーはYouTubeチャンネルでご覧になれます。
先行検証により実機調整期間を大幅短縮
XVL を使って、生産設備のメカや制御ソフトウェアの検証を実機完成前に仮想環境上で行うことで、従来は実機上でしか発見できなかった問題の多くを、あらかじめ仮想環境上で発見・対策できるようになります。これにより、実機を使った検証に要する時間や手間を大幅に削減できます。一般的には、実機調整・試験でのソフトウェア修正や手持ちには多くの手間と時間がかかるため、これに要する期間と工数を短縮できることは、開発リードタイム全体の大幅な短縮につながります。
メカトロ検証向けのXVL製品構成
XVL Kinematics Suite / XVL Vmech Simulator
| XVL Kinematics Suite | XVL Vmech Simulator | |
|---|---|---|
| メカ/制御仕様の先行検証 | ◯ | |
| 制御ソフトウェアの先行検証 | ◯ | |
| 先行検証により実機調整期間を大幅短縮 | ◯ | |
| 各社 PLC 接続 | 各接続オプション | |
| 各社ロボットコントローラ/OLT 接続 | 各接続オプション |
導入事例
ホワイトペーパー
お役立ち資料をご用意しております。ダウンロードをご希望される方は、資料名を選択すると表示されるダウンロード申請フォームからお申込みください。入力されたメールアドレス宛にダウンロード用 URL をお送りします。
ご不明な点や資料請求など、お気軽にお問合せ下さい。
メカトロ検証